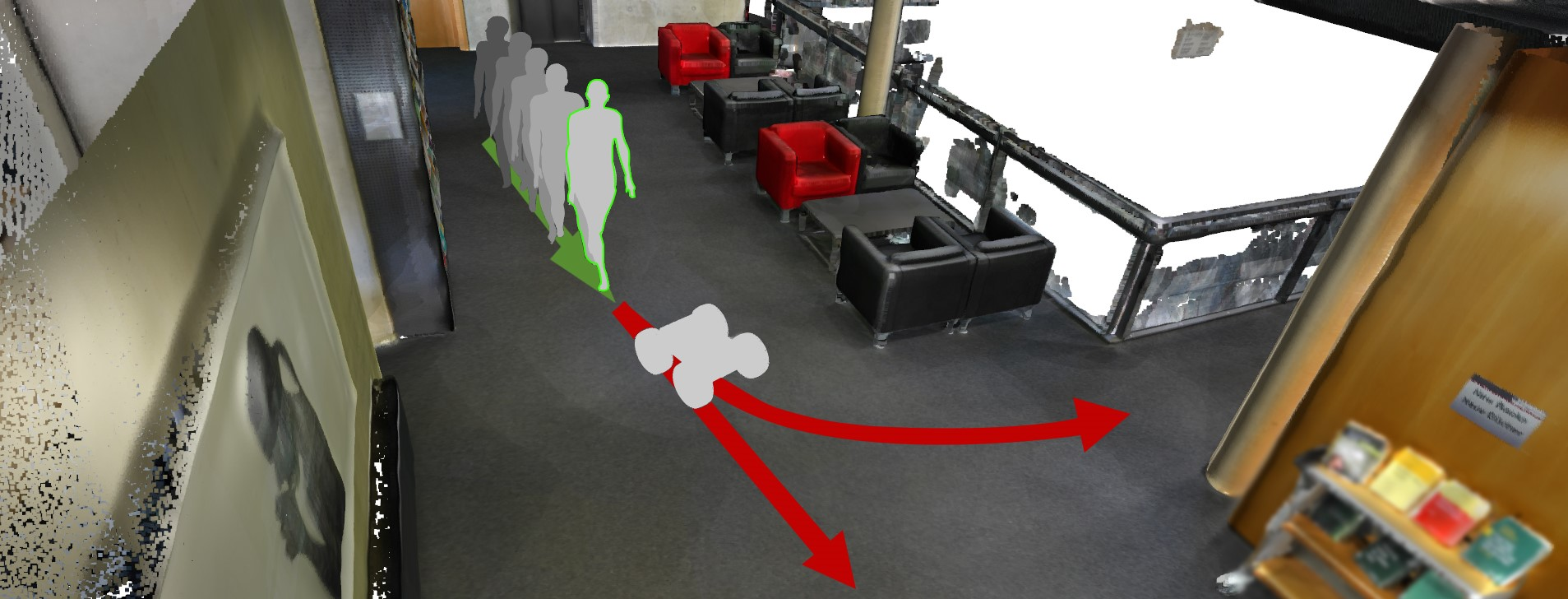
Motivation scenario for closed-loop diffusion planning (CLDP).
(a) A challenging instance of the robot follow-ahead task where a human is entering a junction and the robot needs to stay in front of the human.
(b) We propose to solve such scenarios by (1) predicting a set of human motion samples using a diffusion model, visualized in red lines,
and (2) planning our robot path (dots with arrows in fading colors), with a given initial pose (the yellow arrow), by adjusting the weight for each sample with posterior probability.
The background is an occupancy map, visualized as white (1) for obstacles, grey (0) for free space, and dark (-1) for unknown space.
The past and future (ground truth) human motion are drawn in green and blue lines on the map.